The Rossini project aims to develop a collaborative robot platform, with human safety and work quality as a priority. Making it possible for robots to work in proximity to human operators in overlapping space requires solving and guaranteeing a lot of safety measures.
Traditionally, industrial robots must be confined in restricted areas away from humans, in order to avoid contact and accidents.
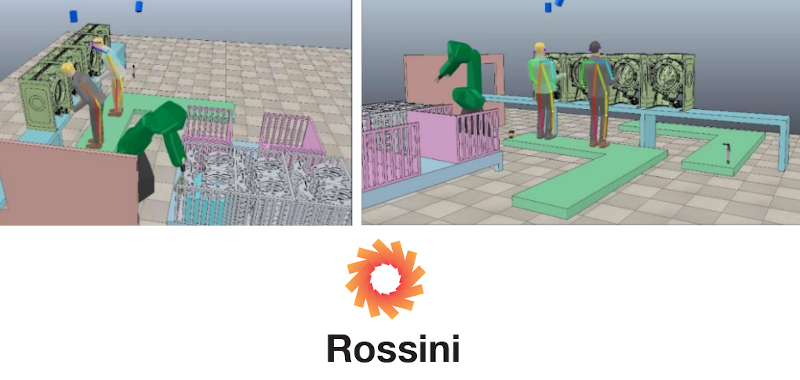
In this project IRIS Technology is focusing on the “perception layer” of the platform, which receives a data stream from a diversity of different sensor types (the “sensor layer”), and from this data identifies where the key objects are (humans, robot, products and components being assembled) and what they are doing.
CLICK HERE TO DOWNLOAD THE PRESS RELEASE.